

 联系我们
联系我们

一、在指定点测量高度与变化
1、LK-G 系列测量原理(三角测量型)
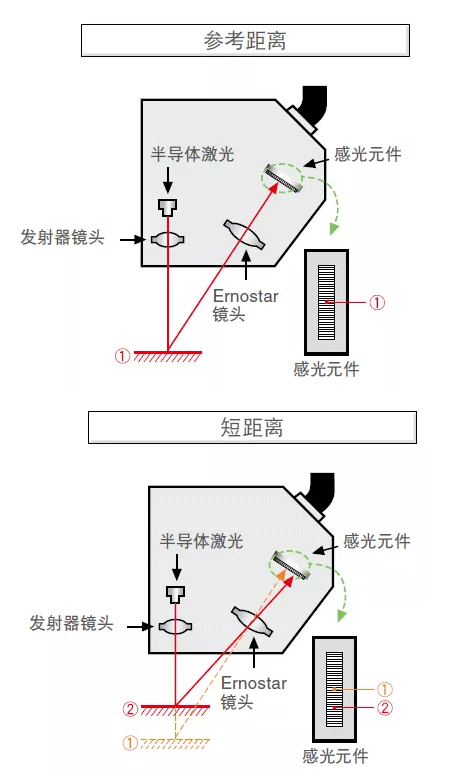
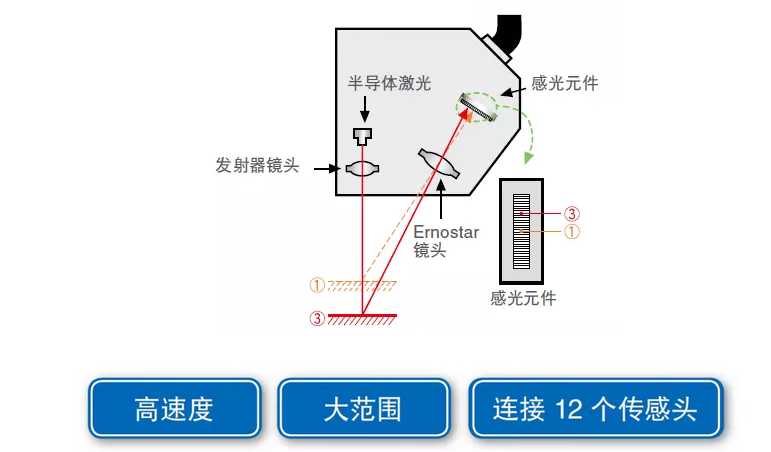
如上图所示,半导体激光向目标发出光束。Ernostar 镜头聚集目标反射的光线并在感光元件上形成图像。光点在感光元件上的位置根据目标的距离而变化。系统对该变化进行估算并转换为目标位置的测量结果。
二、测量台阶高度
1、L J 系列测量原理(2D 三角测量型)

柱面物镜将激光光束扩大为条状,随后激光在目标物上产生漫射。反射光在 HSE3-CMOS 上成像,通过检测位置、形状的变化来测量位移和形状。
2、LT-9000 系列测量原理(共焦型)
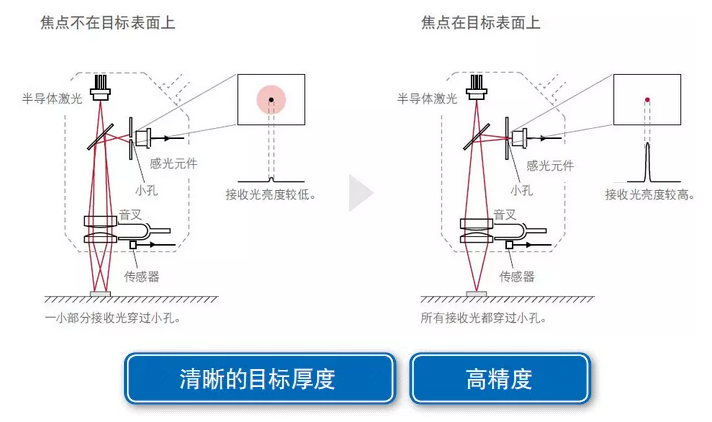
激光束穿过依靠音叉快速上下振动的物镜聚集在目标表面。从目标表面反射的光束汇集在小孔处,随后进入感光元件。传感器通过测量物镜在感光时的确切位置**测出与目标表面的距离,不会受到目标材质、颜色或角度的影响。
了解更多:ABB机器人
- 下一篇:【上下料】一文详解工业机器人上下料应用
- 上一篇:关于ABB机器人的常用指令(下)
